HS-E21智能围棋分拣器
HS-E21智能围棋分拣器说明书
产品简介:
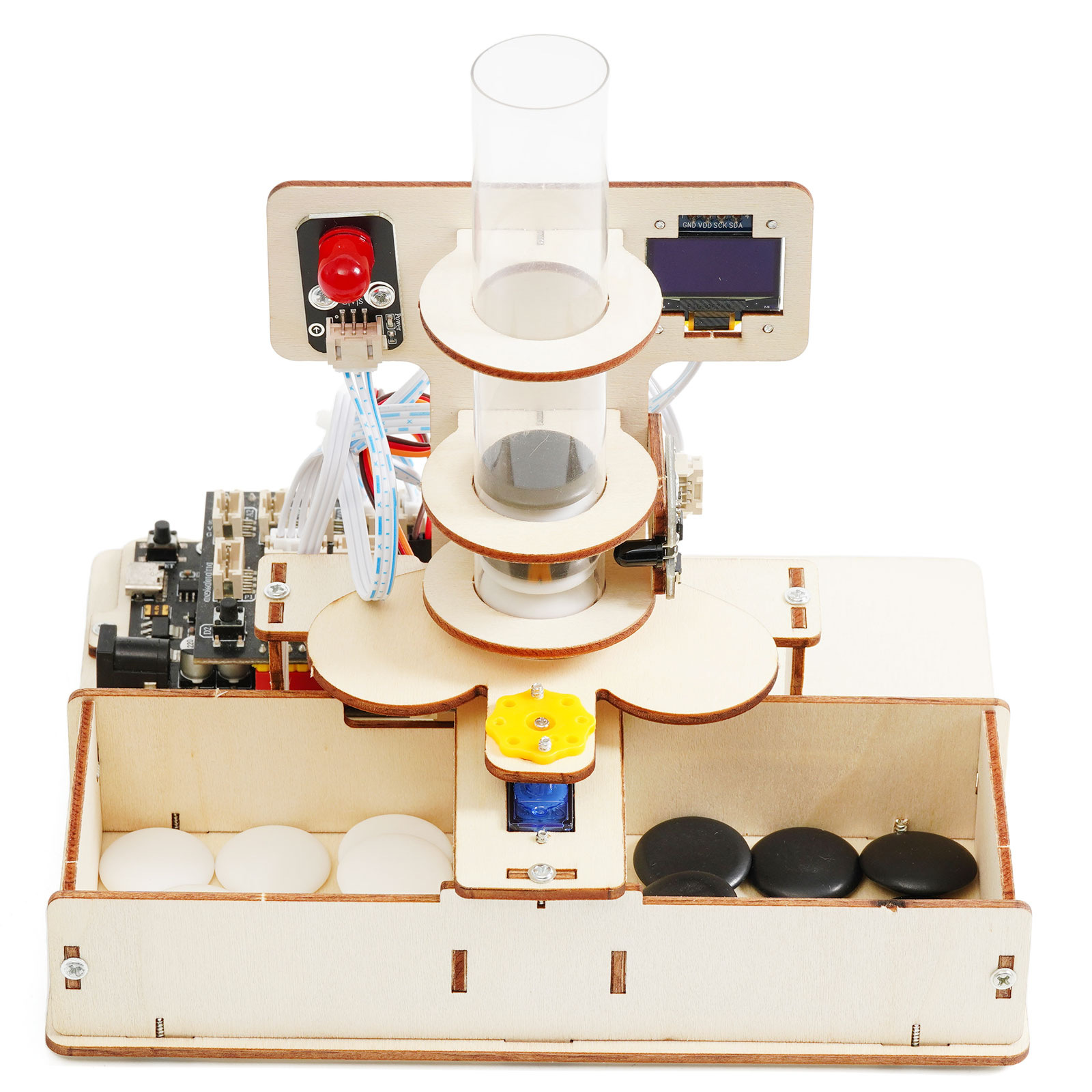
智能围棋分拣器是一款智能套件,由 OLED 显示屏模块、红外循迹传感器、LED 灯、红外信号接收模块、舵机等配件组成。
该套件功能如下:当透明塑料管内有棋子时,红外循迹传感器发出的红外光被棋子阻挡,红外信号接收传感器输出高电平(1),自动启动分拣程序。若红外循迹传感器检测到黑棋,输出高电平(1),舵机转至 160 度;若检测到白棋,输出低电平(0),舵机转至 20 度。当透明塑料管内无棋子时,红外信号接收传感器接收到红外循迹传感器发出的红外光,输出低电平(0),舵机转至 90 度,不执行分拣工作。此外,OLED 显示屏可显示黑白棋子数量。
用户还能通过 Arduino IDE、Mixly 等编程软件修改示例程序或自行编写新程序来控制智能围棋分拣器。(米思齐Mixly软件前往 http://www.hellostem.cn/?software/ 下载)
准备工具及组装注意事项:
自备调试工具:带有Windows 7、8、10、11操作系统的电脑1台、一把小剪刀、UNO-R3开发板、typc数据线1条、产品需要脱机工作请自备或者购买DC头6V-12V电源。
想要轻松组装好套件需要仔细阅读组装说明书,按步骤进行组装,疑难问题请扫二维码关注公众号查看相关教程,或寻找在线客服进行指导。
 警告:
警告:
14岁以下人员必须在专业老师或有相关知识的成年人指导下使用! 该产品组装、调试需要使用相关工具,组装时请做好安全防范,避免受伤! 本产品为教学实验用品,请勿将其功能作为生活常规用品使用,会存在不稳定性! 当你不使用本产品时请关闭电池盒上的电源开关并取下电池,将电池妥善保管!
示例程序下载:点击下载
(文件解压密码请查看您购买的商品外包装产品合格证管理码,商品管理码(90开头数字)为解压密码 )
产品安装视频请移步“Hello STEM”公众号
视频安装在线观看链接:点击观看视频

STEP:1

准备好所有配件及木板材料,木板材料组装时请仔细核对材料上的编号。木板有图案面为正面,没有图案为背面。
STEP:2

首先把OLED显示屏模块插入4P双头端子线,然后把红外循迹传感器和LED灯插入3P双头端子线。
STEP:3

把HS-UNO-EXP2扩展板插入UNO-R3开发板上,注意HS-UNO-EXP2扩展板和UNO-R3开发板的朝向。
STEP:4

首先参照【接线示意图】把舵机导线插入HS-UNO-EXP2扩展板上的【D8】接口上,然后使用米思齐Mixly 软件将该套件的舵机初始化程序上传至UNO-R3开发板上,最后把舵机和HS-UNO-EXP2扩展板拔下来。(米思齐Mixly软件前往 http://www.hellostem.cn/?software/ 下载)
警告:不能跳过此步骤进行下一步安装,跳过此步骤将会导致后续安装失败!注意:请核对好端口线序再插入,线序插错可能会烧坏电路板。
STEP:5

用4mm粗纹螺丝把红外循迹传感器安装在①号板上。
STEP:6

用7mm粗纹螺丝把舵机安装在①号板上。
STEP:7

用7mm粗纹螺丝把②、③、⑬号板安装在④号板上。
STEP:8

用7mm粗纹螺丝把⑤号板安装在②、③、⑬号板上。
STEP:9

用7mm粗纹螺丝把⑥号板安装在④、⑤号板上,然后在⑥号板底部粘上四个脚垫。
STEP:10

参照上图,用4mm粗纹螺丝把LED灯安装在⑦号板上。
STEP:11

参照上图,用4mm粗纹螺丝把OLED显示屏模块安装在⑦号板另一面。
STEP:12

用7mm粗纹螺丝把两块⑧号板安装在⑦号板上。
STEP:13

用7mm粗纹螺丝把⑨号板安装在⑦号板上。
STEP:14

用7mm粗纹螺丝把两块⑪号板安装在⑩号板上。
STEP:15

用7mm粗纹螺丝把⑩号板安装在⑦号板上。
STEP:16

用7mm粗纹螺丝把①号板安装在⑦号板上。
STEP:17

首先用7mm粗纹螺丝把⑦号板和两块⑪号板安装在⑥号板上,然后把①号板安装在④号板上。
STEP:18

首先用4mm粗纹螺丝把UNO-R3开发板安装在垫板上,然后把HS-UNO-EXP2扩展板插入UNO-R3开发板上。
STEP:19

用7mm粗纹螺丝把舵机盘安装在⑭号板上。
STEP:20

参照上图,把舵机盘安装在舵机上。
STEP:21

参照上图,首先用7mm粗纹螺丝把⑫号板安装在⑦号板上,然后用4mm粗纹螺丝把垫板安装在⑥号板上。
STEP:22

首先把红外信号接收模块上的红外接收头轻轻弯折90度,然后用4mm粗纹螺丝把红外信号接收模块安装在⑫号板上。
STEP:23

首先把3P双头端子线插入红外信号接收模块,然后参考【智能围棋分拣器-接线示意图】把OLED显示屏模块、红外循迹传感器、LED灯、红外信号接收模块、舵机端子线插入HS-UNO-EXP2扩展板上,再然后使用扎带把导线扎好,最后剪掉多余的扎带。注意:使用剪刀时请小心,做好安全防范,孩子务必在大人的陪同下使用剪刀。
STEP:24

首先把透明塑料管插入⑧、⑨号板的圆洞内,然后用5mm舵机螺丝把舵机盘安装在舵机上,舵机螺丝在舵机袋子里。注意:请务必断电情况下安装舵机盘(臂),舵机通电时候不要有机械阻力如拧螺丝、 掰 、 扯,阻力大于舵机扭力会发烫烧坏舵机。
STEP:25

首先使用米思齐Mixly软件将该套件的智能围棋分拣器示例程序上传至UNO-R3开发板上,然后在塑料管内放入黑棋和白棋。
STEP:26

在红外循迹传感器通电的情况下,用小螺丝刀调节红外循迹传感器的电位器,调试结果需保证透明塑料管内有白色棋子红外循迹传感器信号灯亮,透明塑料管内有黑色棋子时红外循迹传感器信号灯熄灭。注意:使用螺丝刀旋转传感器背面的电位器时,不要随意转该旋钮,不宜大幅度转动,力度尽可能的轻!旋转过大或者推力过大有可能导致电位器的损坏及无法校准,从而使模块无法正常使用。
STEP:27

在红外信号接收模块通电的情况下,用小螺丝刀调节红外信号接收模块的电位器,调试结果需保证透明塑料管内有棋子时红外信号接收模块灯熄灭,透明塑料管内没有棋子时红外信号接收模块信号灯亮。
STEP:28

智能围棋分拣器制作完成。此套件可实现:当透明塑料管内有棋子时,红外循迹发出的红外光被棋子阻挡,红外信号接收传感器输出高电平(1),自动启动分拣程序。若红外循迹传感器检测到黑棋,输出高电平(1),舵机转至 160 度;若检测到白棋,输出低电平(0),舵机转至 20 度。当透明塑料管内无棋子时,红外信号接收传感器接收到红外循迹传感器发出的红外光,输出低电平(0),舵机转至 90 度,不执行分拣工作。此外,OLED 显示屏可显示黑白棋子数量。
用户还能通过 Arduino IDE、Mixly 等编程软件修改示例程序或自行编写新程序来控制智能围棋分拣器。注意:使用智能围棋分拣器请自备或者购买双节18650尖头锂电池(DC6V~12V电源)。
示例程序下载:点击下载
(文件解压密码请查看您购买的商品外包装产品合格证管理码,商品管理码(90开头数字)为解压密码 )