HS-F27L 4路电机8路舵机扩展板
- 介绍
- 原理图
- 模块参数
- 电路板尺寸
- 添加Arduino库文件
- 添加Micropython库文件
- ArduinoIDE 和Python语言示例程序
- 米思齐 Mixly 示例程序(图形化语言)
- Arduino测试环境搭建
- 视频教程
- 测试结论
1、介绍 点这里回到目录
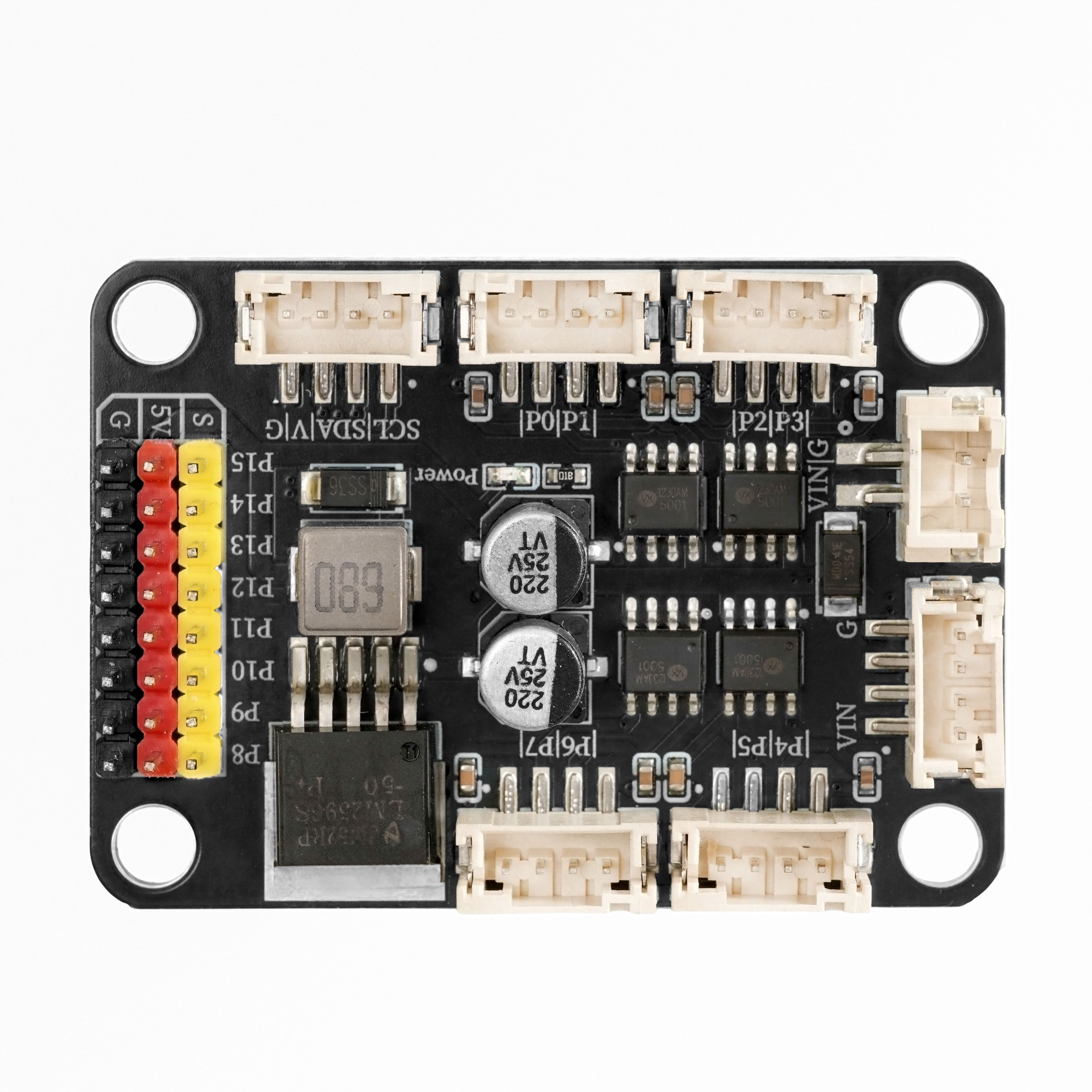
实现电机控制:通过 I2C 接口与外部微控制器相连,利用 PCA9685 芯片输出 PWM 信号,实现对四路 MOC PF 电机的速度等参数的控制。8PIN 接口:提供 8 个引脚接口,可用于连接传感器、其他控制器或扩展更多功能,方便系统的进一步扩展和集成 。
电源管理:通常会集成电源接口,为连接的电机和芯片本身提供合适的电源。部分扩展板还具备反接保护电路,防止因电源正负极接反而损坏电路。
2、原理图 点这里回到目录
3、模块参数 点这里回到目录
| 引脚名称 | 描述 |
|---|---|
| G | GND(电源输入负极) |
| V | VCC(电源输入正极) |
| SDA | 数据引脚 |
| SCL | 时钟引脚 |
-
供电电压: 3.3V-5V
-
连接方式:PH2.0 4P端子线
-
安装方式:乐高搭建
4、电路板尺寸 点这里回到目录

5、添加Arduino库文件 点这里回到目录
Arduino环境库文件安装步骤:参考链接
Arduino环境库文件:点击下载
米思齐UNO开发板库文件安装步骤(使用代码前先下载安装米思齐库文件):参考链接
6、添加MicroPython环境库文件 点这里回到目录
米思齐ESP32开发板库文件下载安装步骤(使用代码前先下载安装米思齐库文件):参考链接
7、Arduino IDE示例程序 点这里回到目录
示例程序(UNO开发板):点击下载
#include "Wire.h"
#include "Adafruit_PWMServoDriver.h"
Adafruit_PWMServoDriver PWM = Adafruit_PWMServoDriver(0x40);
void setup(){
PWM.begin();
PWM.setPWMFreq(85);
}
void loop(){
PWM.setPWM(0,0,0);
PWM.setPWM(1,0,2048);
PWM.setPWM(2,0,0);
PWM.setPWM(3,0,2048);
PWM.setPWM(4,0,0);
PWM.setPWM(5,0,2048);
PWM.setPWM(6,0,0);
PWM.setPWM(7,0,2048);
for (int i = 0; i <= 180; i = i + (1)) {
PWM.setPWM(8,0,(map(i, 0, 180, 140, 680)));
PWM.setPWM(9,0,(map(i, 0, 180, 140, 680)));
PWM.setPWM(10,0,(map(i, 0, 180, 140, 680)));
PWM.setPWM(11,0,(map(i, 0, 180, 140, 680)));
delay(50);
}
}
示例程序(ESP32开发板):
from machine import I2C, Pin
import time
from mixpy import math_map
PCA9685_MODE1 = 0x00
PCA9685_MODE2 = 0x01
PCA9685_LED0_ON_L = 0x06
PCA9685_LED0_ON_H = 0x07
PCA9685_LED0_OFF_L = 0x08
PCA9685_LED0_OFF_H = 0x09
PCA9685_ALLLED_ON_L = 0xFA
PCA9685_ALLLED_ON_H = 0xFB
PCA9685_ALLLED_OFF_L = 0xFC
PCA9685_ALLLED_OFF_H = 0xFD
PCA9685_PRESCALE = 0xFE
MODE1_ALLCAL = 0x01
MODE1_SUB3 = 0x02
MODE1_SUB2 = 0x04
MODE1_SUB1 = 0x08
MODE1_SLEEP = 0x10
MODE1_AI = 0x20
MODE1_EXTCLK = 0x40
MODE1_RESTART = 0x80
MODE2_OUTNE_0 = 0x01
MODE2_OUTNE_1 = 0x02
MODE2_OUTDRV = 0x04
MODE2_OCH = 0x08
MODE2_INVRT = 0x10
PCA9685_I2C_ADDRESS = 0x40
FREQUENCY_OSCILLATOR_HZ = 25_000_000
PRESCALE_MIN = 3
PRESCALE_MAX = 255
class PCA9685:
def __init__(self, i2c: I2C, addr: int = PCA9685_I2C_ADDRESS):
self.i2c = i2c
self.addr = addr
self._oscillator_freq = FREQUENCY_OSCILLATOR_HZ
def _write8(self, reg: int, val: int):
self.i2c.writeto_mem(self.addr, reg, bytes([val & 0xFF]))
def _read8(self, reg: int) -> int:
return self.i2c.readfrom_mem(self.addr, reg, 1)[0]
def _write4(self, base_reg: int, on: int, off: int):
buf = bytearray(4)
buf[0] = on & 0xFF
buf[1] = (on >> 8) & 0x0F
buf[2] = off & 0xFF
buf[3] = (off >> 8) & 0x0F
self.i2c.writeto_mem(self.addr, base_reg, buf)
def begin(self):
self.reset()
mode1 = self._read8(PCA9685_MODE1)
self._write8(PCA9685_MODE1, mode1 | MODE1_AI)
self.set_output_mode(True)
def reset(self):
self._write8(PCA9685_MODE1, MODE1_RESTART) # 写 RESTART
time.sleep_ms(10)
def sleep(self):
m1 = self._read8(PCA9685_MODE1)
self._write8(PCA9685_MODE1, m1 | MODE1_SLEEP)
time.sleep_ms(5)
def wakeup(self):
m1 = self._read8(PCA9685_MODE1)
self._write8(PCA9685_MODE1, m1 & (~MODE1_SLEEP))
time.sleep_ms(5)
def set_output_mode(self, totempole: bool = True):
m2 = self._read8(PCA9685_MODE2)
if totempole:
m2 |= MODE2_OUTDRV
else:
m2 &= ~MODE2_OUTDRV
self._write8(PCA9685_MODE2, m2)
def set_oscillator_frequency(self, freq_hz: int):
self._oscillator_freq = int(freq_hz)
def get_oscillator_frequency(self) -> int:
return self._oscillator_freq
def set_pwm_freq(self, freq_hz: float):
if freq_hz < 1.0:
freq_hz = 1.0
if freq_hz > 3500.0:
freq_hz = 3500.0
prescaleval = ((self._oscillator_freq / (freq_hz * 4096.0)) + 0.5) - 1.0
if prescaleval < PRESCALE_MIN:
prescaleval = PRESCALE_MIN
if prescaleval > PRESCALE_MAX:
prescaleval = PRESCALE_MAX
prescale = int(prescaleval)
oldmode = self._read8(PCA9685_MODE1)
newmode = (oldmode & ~MODE1_RESTART) | MODE1_SLEEP
self._write8(PCA9685_MODE1, newmode)
self._write8(PCA9685_PRESCALE, prescale)
self._write8(PCA9685_MODE1, oldmode)
time.sleep_ms(5)
self._write8(PCA9685_MODE1, oldmode | MODE1_RESTART | MODE1_AI)
def read_prescale(self) -> int:
return self._read8(PCA9685_PRESCALE)
def set_pwm(self, ch: int, on: int, off: int):
base = PCA9685_LED0_ON_L + 4 * ch
self._write4(base, on & 0x1FFF, off & 0x1FFF)
def set_pin(self, ch: int, val: int, invert: bool = False):
if val < 0:
val = 0
if val > 4095:
val = 4095
if invert:
if val == 0:
self.set_pwm(ch, 4096, 0) # fully ON
elif val == 4095:
self.set_pwm(ch, 0, 4096) # fully OFF
else:
self.set_pwm(ch, 0, 4095 - val)
else:
if val == 4095:
self.set_pwm(ch, 4096, 0) # fully ON
elif val == 0:
self.set_pwm(ch, 0, 4096) # fully OFF
else:
self.set_pwm(ch, 0, val)
def write_microseconds(self, ch: int, us: int):
prescale = self.read_prescale() + 1
us_per_bit = (1_000_000.0 * prescale) / float(self._oscillator_freq)
ticks = int(us / us_per_bit + 0.5)
if ticks < 0:
ticks = 0
if ticks > 4095:
ticks = 4095
self.set_pwm(ch, 0, ticks)
i2c = I2C(0, scl=Pin(22), sda=Pin(21), freq=400000)
PWM = PCA9685(i2c, addr=0x40)
PWM.begin()
PWM.set_pwm_freq(50)
while True:
PWM.set_pwm(0,1,4095)
PWM.set_pwm(1,1,2000)
PWM.set_pwm(2,1,4095)
PWM.set_pwm(3,1,2000)
PWM.set_pwm(4,1,4095)
PWM.set_pwm(5,1,2000)
PWM.set_pwm(6,1,4095)
PWM.set_pwm(7,1,2000)
PWM.set_pwm(8, 0, int(math_map(90, 0, 180, 140, 680)))
time.sleep(5)
PWM.set_pwm(0,1,2000)
PWM.set_pwm(1,1,2000)
PWM.set_pwm(2,1,2000)
PWM.set_pwm(3,1,2000)
PWM.set_pwm(4,1,2000)
PWM.set_pwm(5,1,2000)
PWM.set_pwm(6,1,2000)
PWM.set_pwm(7,1,2000)
PWM.set_pwm(8, 0, int(math_map(0, 0, 180, 140, 680)))
time.sleep(5)
8、米思齐 Mixly 示例程序(图形化语言) 点这里回到目录
示例程序(UNO开发板):点击下载

示例程序(ESP32开发板):点击下载

9、测试环境搭建 点这里回到目录
Arduino UNO 测试环境搭建
准备配件:
- UNO-R3 开发板 *1
- UNO-R3 EXP 扩展板 *1
- USB type-c 数据线 *1
- HS-F27 4路电机8路舵机扩展板*1
- PH2.0 4P双头端子线 *1
- 6-9V电池盒*1
- 乐高电机*4
- 舵机*4
电路接线图:

ESP32 Python 测试环境搭建
10、视频教程 点这里回到目录
Arduino UNO视频教程:点击查看
ESP32 Python视频教程:
11、测试结论 点这里回到目录
Arduino UNO测试结论:
下入代码,接上对应模块,上电之后,电机和舵机会同时转动。
